岩や崖は普通のロボットカーで走れない
インテル、オフロード用の自動運転AIを鍛えるシミュレーター開発でDARPAと契約
Share

インテルは、米国防高等研究計画局(DARPA)のオフロード向けロボットカー開発プログラムの一環で、開発コストを大幅に削減するシミュレーションプラットフォームを開発する契約を結んだ。
これは、RACER-Sim(Robotic Autonomy in Complex Environments with Resiliency – Simulation)プログラムと呼ばれるもの。オフロードカーにおける自動運転技術を開発するため、人工知能(AI)を使ったソリューションの開発やシミュレーション技術を提供することを目的としている。
インテルはこの契約をスペインのComputer Vision Center、テキサス大学オースティン校との共同プロジェクトとしている。Intel LabsのAutonomous Agents Labディレクター、German Ros氏は、このチームにより「あらゆるタイプの環境と条件に対応するオフロード地上ロボットの進歩を加速するための、多用途でオープンなプラットフォームを作成することを目標とした」と述べている。
自動運転技術の開発がハイウェイや一般公道での開発が進む一方、あらゆる地形を走破する必要のあるオフロードカーやATVなどの自動化技術開発は、まだまだ遅れている。岩やあらゆる種類の植物、その他地形的な障害物に遭遇することが考えられるオフロードを走る自動車を自動運転化するのは、整備されて予測可能な道を走るのとは、まったく違う周囲環境の識別能力が要求されるためだ。
また、LiDARやカメラセンサー技術もまだまだオフロード走行には最適化されておらず、そのための技術開発やシミュレーションによる試験には多大な時間とコストがかかる。
RACER-Simプログラムは、2フェーズ/48ヶ月のプログラムとなる。第1段階では、複雑なオフロード環境を最高の精度で模倣する、新しいシミュレーションプラットフォームとマッピングツール(センサー技術開発、地形の複雑さ認識など)を、これまでにないスケールで作成するとしている。
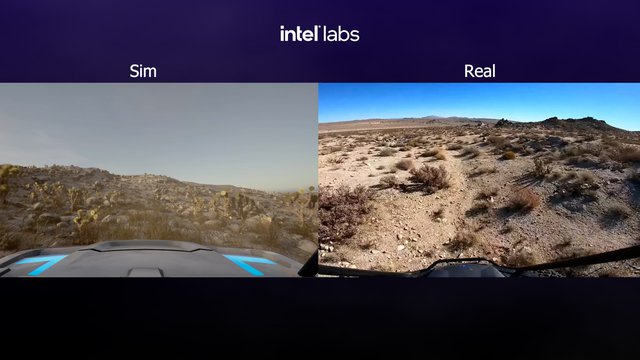
そして第2段階では、チームはシミュレーションでロボットカー用AIに新しいアルゴリズムを実装することで、研究開発プロセスを加速させる。これにより、いちいち実機の開発や実装時間、リソースを大幅に節約する。こうして、最終的に必要なスキルを習得したAIが、ロボットカーの実機に転送されることになる。
DARPAは、これまでにも無人潜水艦や無人戦闘機など、米軍向けの自動運転技術に取り組んできた。今回のオフロード向け自動運転技術も、ゆくゆくは無人で走行する軍用車両への適用が考えられる。
とはいえ、こうしたシステムの実用化と採用が日常的なレベルにまで普及していけば、ゆくゆくはその制御を遠隔から奪われ、悪用される可能性も考えられる。そうすると、サイバーセキュリティに関するリスク管理が重要になっていくかもしれない。