NASAも開発協力
サルの手足にヒントを得た、切り立った崖もよじ登る四足ロボ「LORIS」
Share
研究者は特殊な能力を持つロボットを開発する際、しばしば自然界の生物からヒントを得ることがある。カーネギーメロン大学ロボメカニクス研究所の研究者らも、切り立った垂直面を登攀できるロボットの開発に、同様の能力を持つ生き物が持つ特徴を拝借した。
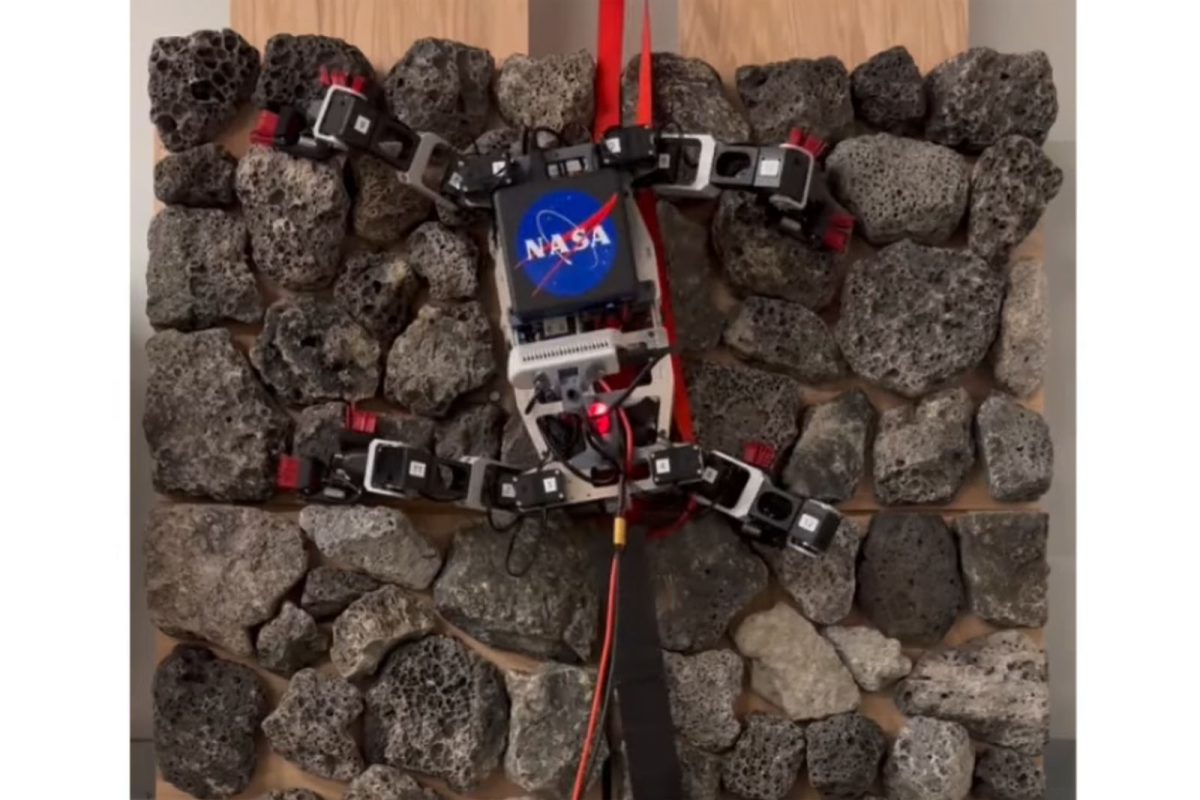
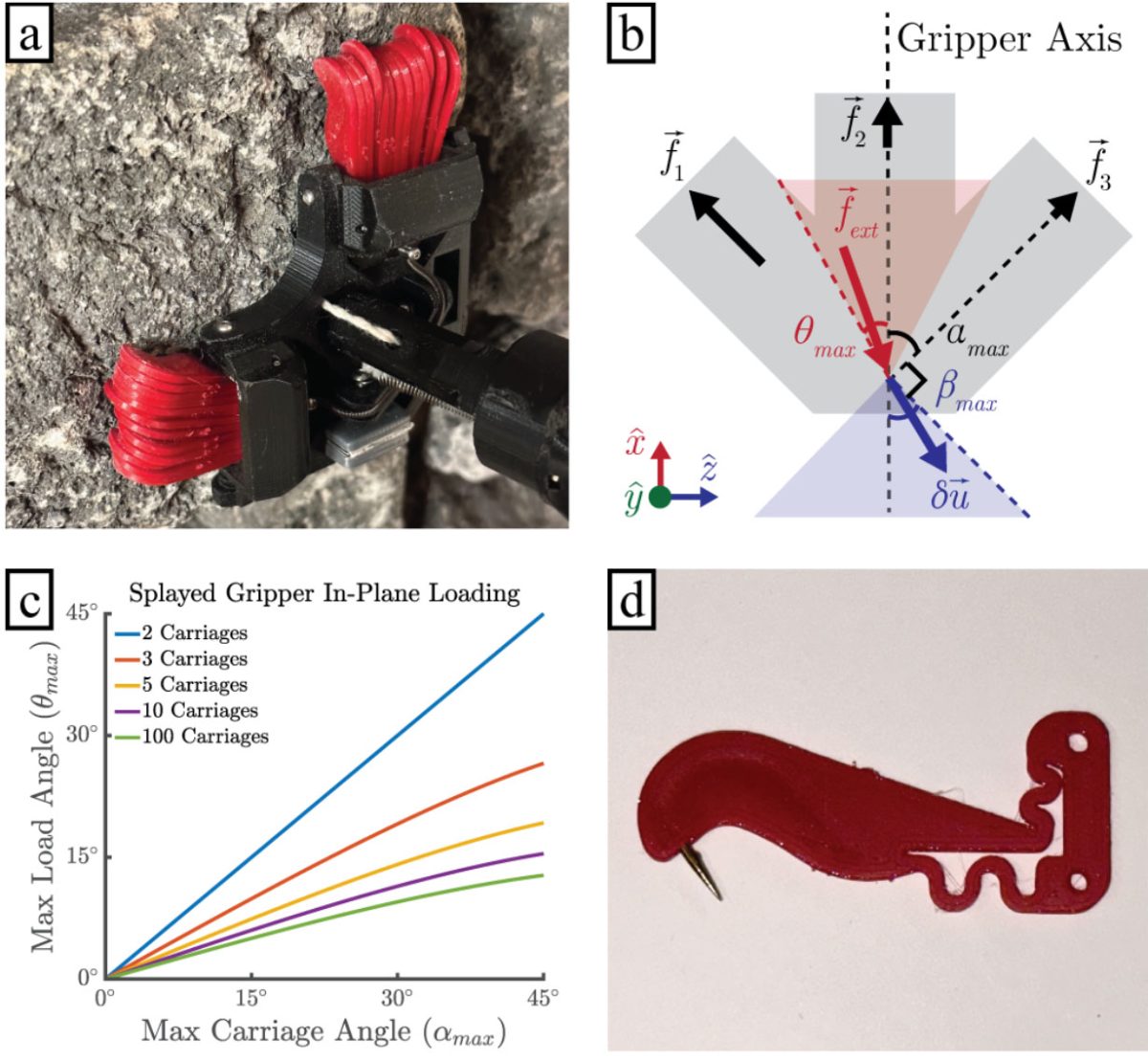
「LORIS」と名付けられたそのロボットは、左右に脚を広げるようなデザインの四足ロボットだが、その足先には3Dプリントされたプラスチックのツメに「Microspine」グリッパーと呼ばれる釣り針のようなフック構造を埋め込んでいる。その構造は、登攀面の小さな手がかりとなる部分やクラックに引っかかり、グリッパーを上に持ち上げれば壁面からすんなりと離れる。

ただ、普通のMicrospineグリッパーでは、なめらかでない壁面や岩でゴツゴツした崖のような壁を上ることは難しい、そこで、研究者らはロリス(Loris)と呼ばれる、木登りをする小さなサルの手足を参考とした。ロボットの名称は「Lightweight Observation Robot for Irregular Slopes」の略だが、もちろんロリスにも引っかけている。
ロボットの4本の足の先には、それぞれ互いに直角に向いた2組のMicrospineグリッパーがあり、手首や足首にあたる部分がパッシブに可動することで、壁をしっかりとグリップすることができる。そして、片方の足のグリッパーが登攀面をつかめば、体の対角側の足のグリッパーも同様につかむようになっている。
こうしてしっかりとロボットの身体が保持されれば、残る2本の足は自由に動かすことができるため、上方へステップを進めることができる。
研究者は、LORISがパッシブな仕組みのMicrospineグリッパーの軽量性、スピード、エネルギー効率、シンプルさに加え、電動アクチュエーターを備えるアクティブグリッパーのしっかりした保持力の両方を備えていると説明している。さらに、Microspineグリッパーは製造が簡単で、安価になるように設計されていると述べた。
- Source: Carnegie Mellon University
- via: New Atlas