SFの世界のものが、またひとつ現実になりつつあります
【動画】ジェットパック搭載ヒューマノイド「iRonCub3」が初の浮上試験に成功
Share
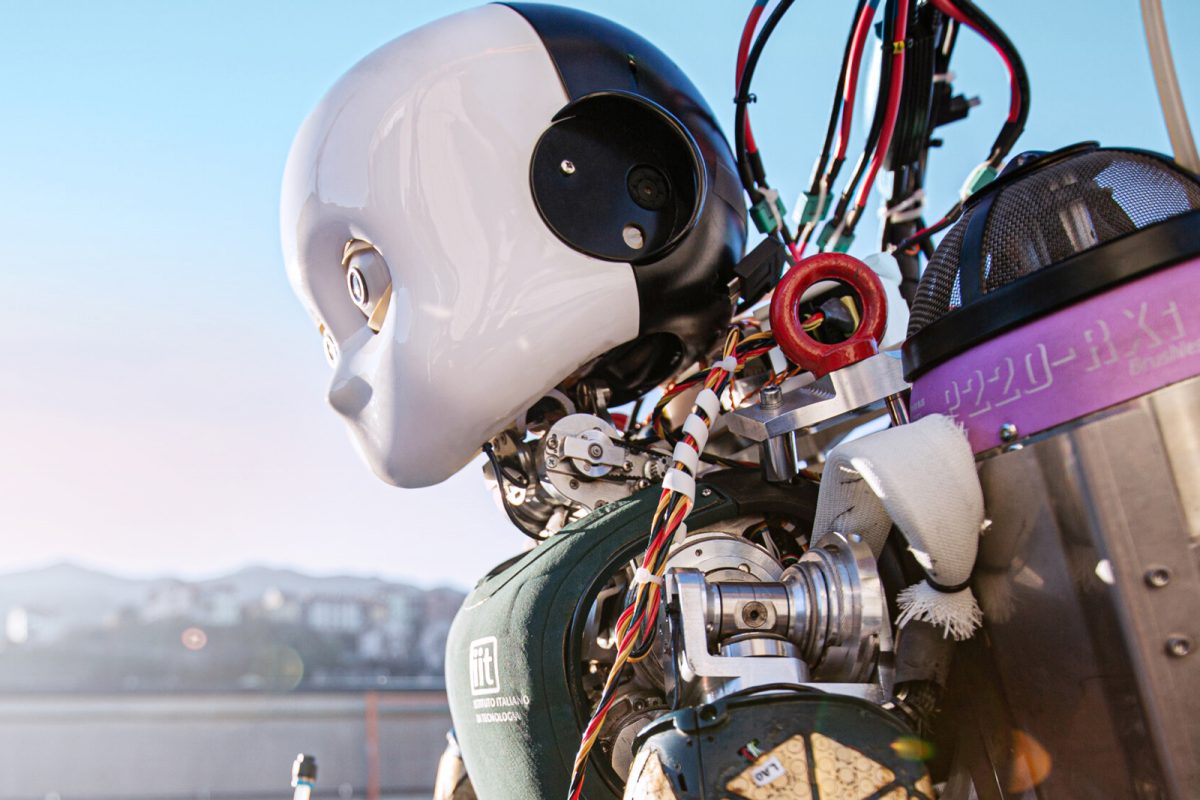
イタリア政府が設立し、資金提供している科学技術研究のための財団、イタリア技術研究所(IIT)は、数年前から災害などの非常事態発生時に出動して緊急対応にあたるヒューマノイド「iRonCub」の開発に取り組んでいる。そして最近、この「iRonCub3」が初めて地面から浮上し、ホバリング状態を維持することに成功した。
これはIITの人工知能および機械知能グループによるプロジェクトで、もともとはAI研究用に開発された二足歩行ロボット「iCub」に、ジェットエンジンを搭載して飛行能力を授けようというものだ。
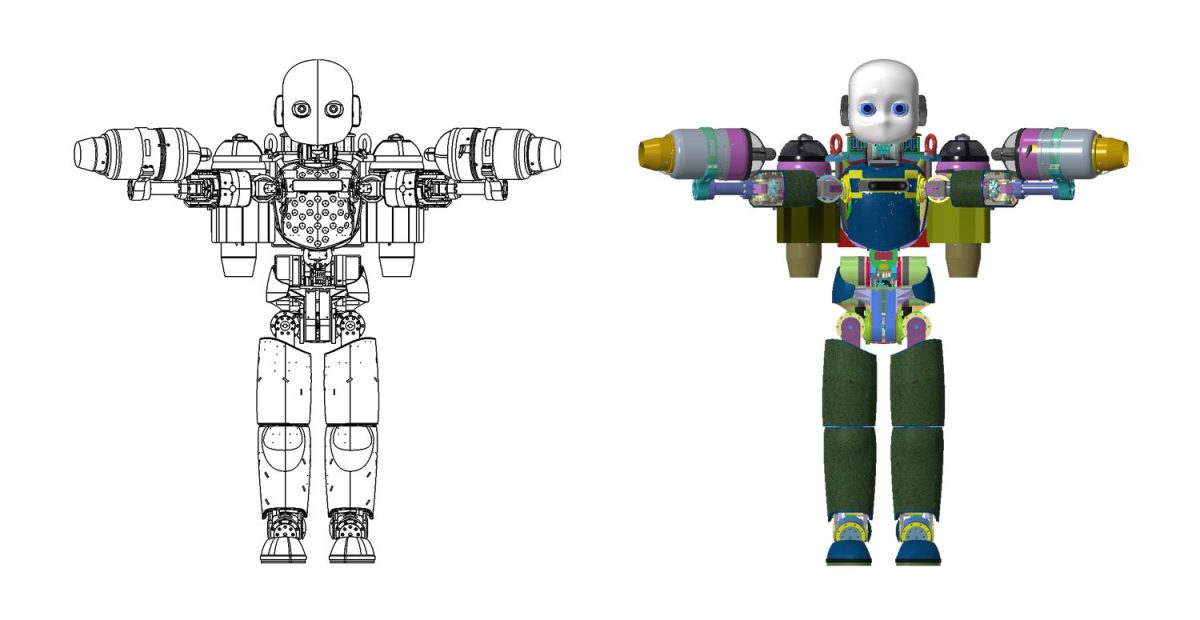
具体的には、ヒューマノイドにランドセル式のジェットパックを装着し、さらに両手にもそれぞれジェットエンジンを握らせて、合計最大推力1000N(約102kgf)のジェット噴射によって、約70kgのロボットを地面から浮き上がる。
昭和生まれの日本人なら、ついつい「まるで鉄腕アトムのよう」…と形容したくなるところだが、IITの技術者らは、iRonCubはトニー・スタークにインスパイアされたと述べている。
また、飛行時にロボット本体にかかる力を考慮して、人間でいう脊椎の役割を担うパーツの素材にチタンを採用するといった改良を加えている。なお、エンジンから放たれるジェット噴流の温度は約800℃に達するため、脚部には耐熱用の保護カバーが装着されている。
実際にロボットが浮上する動画を見ればわかるように、iRonCub3は特にふらつくこともなく浮上し、短時間ながら安定したホバリングをカメラの前で披露している。
研究チームは、飛行ヒューマノイド開発の最初のバージョンであるiRonCubが「ジェットパックの設計、推定アルゴリズム、空気力学の学習といったコンポーネントを個別に開発・テストするために使用されていたのに対し、現在のiRonCub3は、AI制御や必要なセンサー類のアップデート「現実的な飛行力学をサポートするためのFEM(有限要素法)解析を用いた両手の設計、ジェット噴射とロボットの関節の非線形な作動に対応する予測制御などを含む、高度なマルチレート制御アーキテクチャー」を搭載していると説明した。
通常、飛行機やヘリコプター、ドローンなどの空飛ぶ機械の類いは、本体そのものに変形する関節などを持たない。しかし、多様な姿勢を取れるヒューマノイドを飛ばすとなると、可動部形状の多様さなどが、AIを駆使した飛行制御システムの開発を複雑なものにしていると研究チームは述べている。
「この研究は従来のヒューマノイド開発とは根本的に異なり、最先端技術を大きく飛躍させる必要があった」と研究チームを率いたダニエレ・プッチ氏は説明している。特にジェットエンジンの「排出ガスは700℃に達し、ほぼ音速で流れるため、空力計算はリアルタイム処理する必要がある」こと、「制御システムが低速の関節アクチュエータと高速なジェット噴射の両方に対応する必要があった」とした。
IITは、iRonCub3の最終的な目標は災害現場などなにか緊急事態の現場に「飛んで」行って対処したり、高所の点検作業などをこなしつつ、遠隔のオペレーターにデータを送信するといった使い方を想定している。もちろん、ヒューマノイドなので着地して歩行したり、段差や障害物などを乗り越え、ドアを開けて何かを探索できるようになることも目指しているとのことだ。
- Source: IIT(YouTube)
- via: New Atlas