集団で走ってくるとちょっと怖いかも
『スター・ウォーズ』グリーヴァス将軍の乗り物から着想、2本足モノホイールロボット「Ringbot」
Share

イリノイ大学アーバナ・シャンペーン校のジュヒョン・キム准教授らは、モノホイールタイプの自律走行ロボット「Ringbot」を開発した。
モノホイールとは、リング状のレールに取り付けられた電動プラットフォームにライダーが座り、そのレールが1つの大きな車輪の内側を形成する乗り物のこと。映画『MIB』のシリーズ3作目に登場したジャイロサイクルがその典型的なものだ。また、映画『スター・ウォーズ』シリーズに登場するグリーヴァス将軍のモノホイール・ヴィークル「TSMEU-6」もその一種だ。
実際、キム准教授はRingbotの開発にあたり、『スター・ウォーズ』からインスピレーションを得たと述べている。
Ringbotの車輪は直径515mmもあり、ナイロンとカーボンでできた複合リムにエラストマー製のソリッドタイヤが装着されている。リムの内側(底部)には、2つのモーター駆動モジュールが搭載。これらのモジュールは互いにカールコードで接続され、車輪のリム部分のギヤ形状に噛み合って駆動力を伝達する。
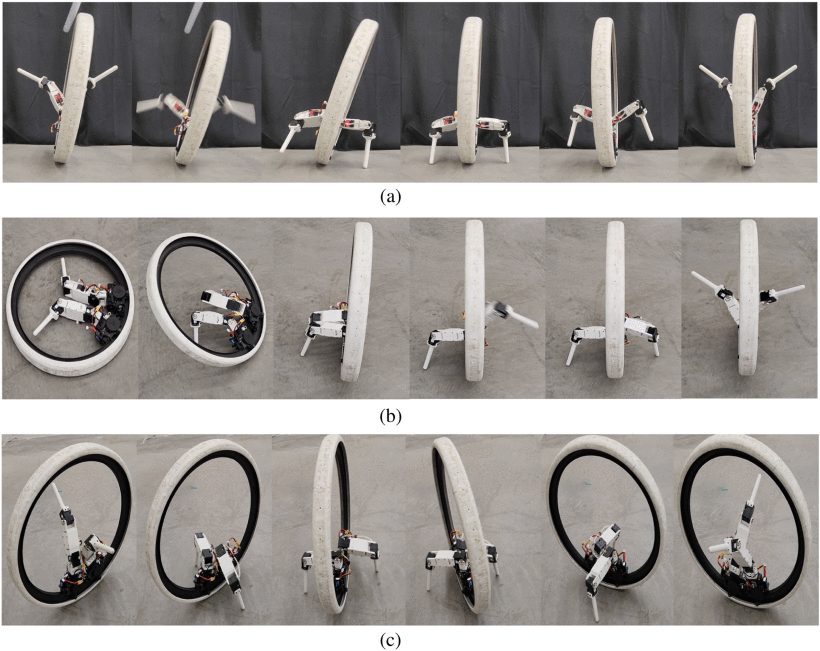
各駆動モジュールは走行中に正しい姿勢を維持するため、異なる速度で走行しモジュール間の互いの距離を自動的に調整する。また、必要に応じてモジュールから左右に脚を伸ばすこともでき、コーナリングの際にロボットの重心バランスを移動させる。
さらに、停止時はその脚を地面に下ろしてスタンドの変わりにもなる。走行再開時に、脚で向きを変えるといったこともできるほか、運悪く転倒してしまっても足を使って自律的に復旧する。
これまでに行われた屋内テストでは、リングボットは人間のオペレーターによって遠隔操作され、最高速度5km/hでの走行が可能になった。
キム准教授は今後、より高速で大型の後継ロボットを開発する際には「カメラ、センサー、GPSを活用し、混雑した市街地の交通を自律的にすり抜け、企業や個人に商品を届けるようになるかもしれない」としている。ただし、階段の昇降や障害物の多い地形でも移動を可能とするため、モノホイールのコンセプトではなく、Boston DynamicsのSpotのような4脚ロボットの足先が車輪上になったものにする可能性もあるという。
この研究に関する論文は、IEEE Transactions on Robotics誌に掲載された。