若干キモい立ちあがり方
ヒト型ロボットを転倒状態から即座に立ち上がらせる。強化学習手法「HoST」を中国の研究者が発表
Share
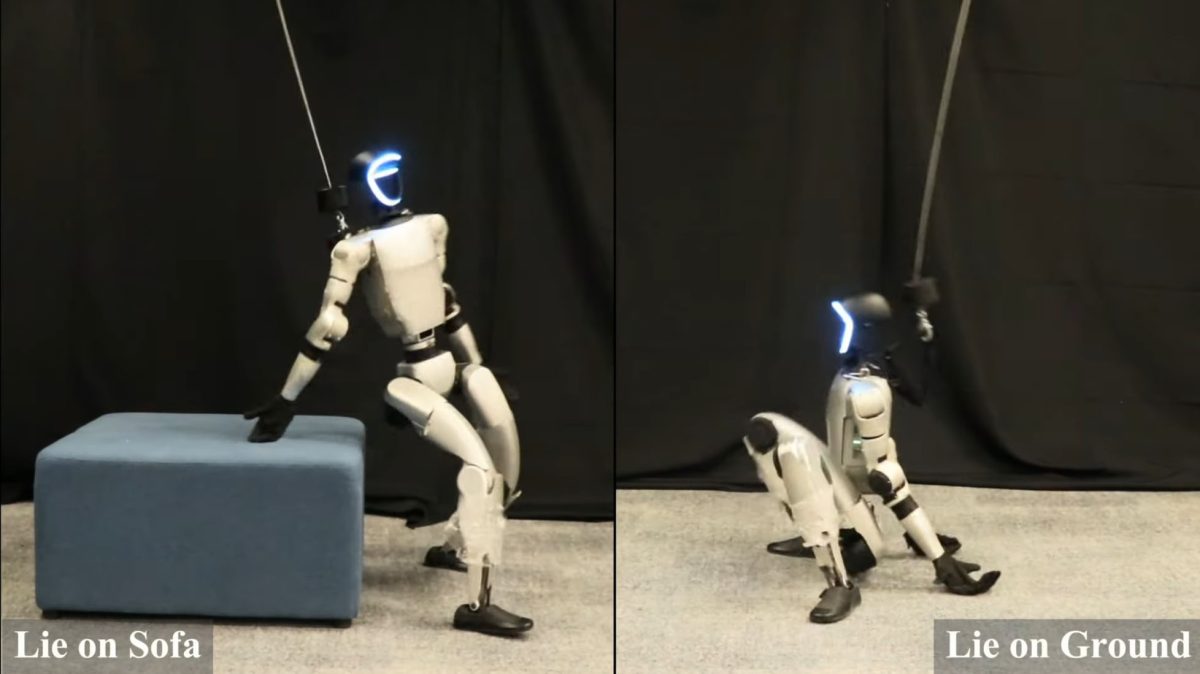
中国・香港の研究者が、起立状態にない、仰向けに横たわっていたり、尻を地面に付けて座り込んだ状態からでもすぐに立ち上がることができるヒト型ロボットを開発し、その動画を公開した。
研究チームは2月12日にGitHubでこのロボットの開発成果を公開した。査読はまだであるもののプレプリントデータベースのarXivには論文や上に述べた動画もアップロードしている。
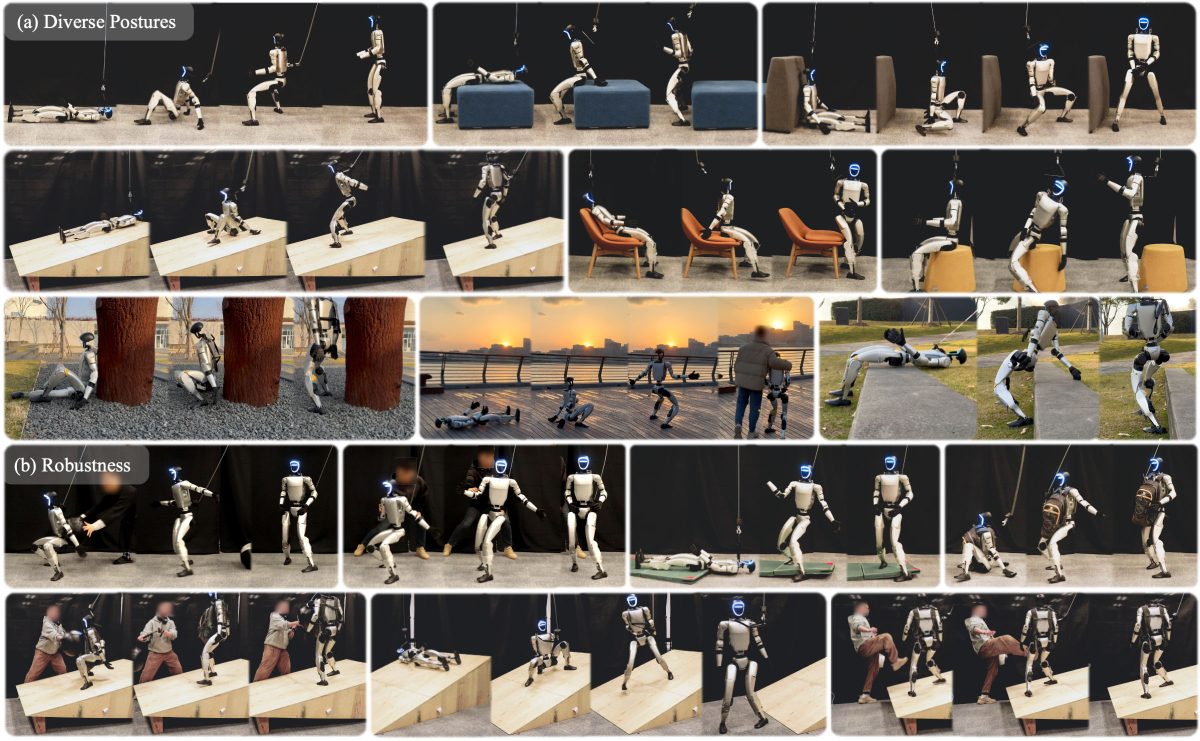
研究者らはただ立ち上がるだけでなく、石畳や斜面、なにかにもたれかかった状態など、さまざまな地形や姿勢からヒューマノイドロボットが自ら起き上がる能力もテスト。立ち上がる際には横からその動作を邪魔をしたりして、あらゆる状況でもロボットが起立状態にまで復帰できるかを確認した。
このいかなる姿勢からでも即座に立ち上がる能力を身につけさせるため、研究者らは強化学習を利用したHumanoid Standing-up Control(HoST)と称するフレームワークを構築したとのことだ。
このロボットそのものはUnitreeのヒューマノイドロボットであるG1を使用しているが、その動作はあらかじめNvidiaが開発した物理シミュレーション環境であるIsaac GymでHoSTを強化学習させしたものを用いている。
そしてロボットに適用後は基本的に、そのロボットがアクションを実行し、アクションが肯定的な結果だった場合に報酬となる信号をAIに送ることで、次回以降にその動作を再現してうまく実行するよう促す強化を繰り返したという。
もちろん、報酬項目はいくつか用意され、動作のバリエーションを揃えつつ不規則な動きや激しい動きを防ぐなめらかな動作や、姿勢を安定的に制御するため、一連の動作の制約も適用した。
科学者らは「ヒューマノイドロボットによる実験結果は、さまざまな現実世界のシナリオにおいて、スムーズで安定かつ力強い立ち上がり動作を実証している」と論文に記している。さらに「この研究は将来的に、既存のヒューマノイドシステムに立ち上がり制御を統合する道を開き、現実世界での適用範囲を拡大する可能性を秘めている」としている。
これまでに、ヒューマノイドロボットは人間のように歩いたり走ったり、さらにはパルクールまでもこなすようになってきたが、実用に供する場合は、もし何らかのアクシデントでロボットが転倒してしまっても、自ら起き上がる能力を備えている必要がある。今回の研究はその課題を越える能力を中国のロボット業界が習得しつつあることを示している。
- Source: HoST / Tao Huang
- via: Live Science